Transformation du réseau N en réseau pilotable par logiciel
Fin 2022, la section N du club a pris une grande décision : faire entrer le réseau N dans l’ère du pilotage par logiciel. Jusqu’alors, il fonctionnait en analogique ou en numérique via l’ECOS ; l’objectif était désormais de le rendre compatible avec un logiciel de conduite des trains… sans perdre son âme au passage.
Pour y parvenir, il a fallu transformer le réseau en profondeur : le découper en cantons et installer des cartes de rétrosignalisation. Ces cartes permettent au logiciel de savoir précisément où se trouvent les trains, dans quel canton ils circulent et dans quel sens. Bref, donner des yeux au réseau (et éviter qu’il ne joue à cache-cache avec les locomotives).
La principale difficulté de cette transformation résidait dans le fait de conserver la possibilité d’un pilotage analogique, histoire de ne pas frustrer les puristes et les amateurs de « vrai » bouton rotatif.
Les premières réflexions ont donc porté sur des choix structurants : quelle carte de rétro utiliser, quel bus de communication adopter pour remonter les informations vers le logiciel, comment gérer les aiguillages aux commandes variées, et enfin, quel logiciel serait retenu.
Les options choisies furent les suivantes :
- Carte de rétrosignalisation développée au club, comportant 4 détections de cantons par consommation de courant
- Bus S88N pour la remontée des informations, associé à un HSI-USB envoyant directement les données vers le PC afin d’éviter toute surcharge de la centrale
- Le logiciel Train Controller, reconnu pour son intuitivité et déjà bien connu de nombreux membres du club
- L’ensemble des aiguillages piloté par des servomoteurs DECAPOD via une carte de commande développée au club
La mise en œuvre et le début des travaux ont démarré en janvier 2023.
La découpe du réseau en cantons a été facilitée par sa conception modulaire. En revanche, un recâblage électrique complet s’est imposé afin de repartir sur des bases saines. Le choix d’un câblage en fils de plus forte section (1 mm²) permet aujourd’hui une meilleure distribution de la puissance sur l’ensemble du réseau — parce que même les trains miniatures n’aiment pas les baisses de régime.
Il a également été décidé de séparer le bus de puissance (traction des trains) d’un second bus dédié à la commande des aiguillages et des accessoires.
Le réseau comporte désormais quatre bus courant sous les modules :
- Bus J/K puissance pour la traction (sectionnable via un arrêt d’urgence)
- Bus J/K de commande pour le pilotage des aiguillages et accessoires
- Bus d’alimentation 12 V DC pour les différentes cartes électroniques
- Bus d’alimentation 24 V DC pour le pilotage numérique et analogique
Concernant la rétrosignalisation, les cartes de détection ont été implantées sur l’ensemble du réseau. Afin de garantir la compatibilité avec le mode analogique, des relais ont été ajoutés pour isoler les cartes de rétro lorsque nécessaire, évitant ainsi les changements de potentiel indésirables. Ces relais sont pilotés par le bus 24 V DC.
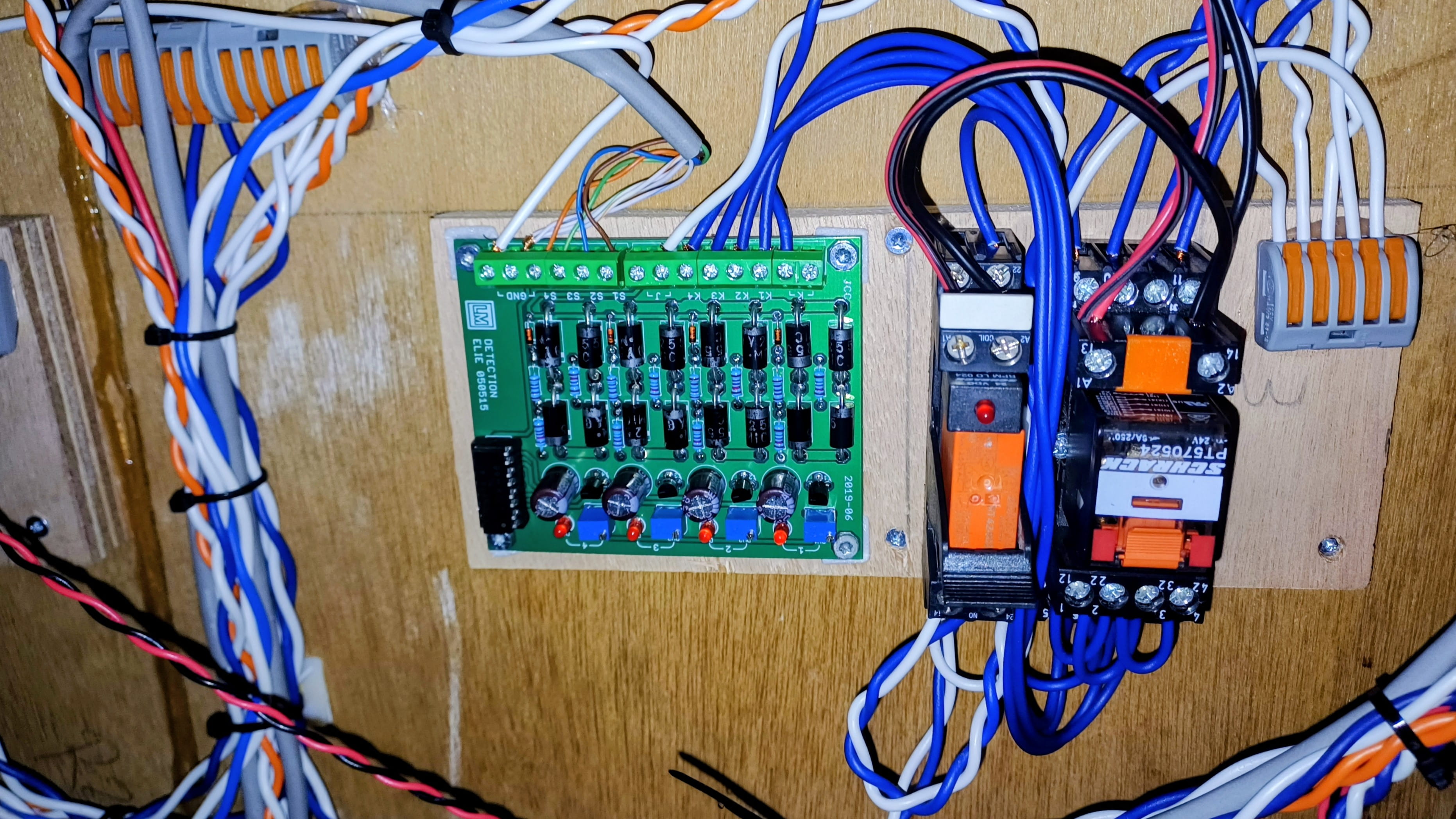
Le câblage des cartes de rétro a d’ailleurs donné lieu à une séance d’initiation au montage et à la soudure des composants pour les membres du club — fer à souder en main, concentration maximale, et odeur caractéristique de l’électronique en action.
La modification globale du câblage a permis d’améliorer le roulage des trains, notamment à l’entrée et à la sortie de la grande raquette.
Certains modules ont été retournés pour faciliter le câblage, et de nouvelles cartes électroniques ont été installées pour le pilotage des aiguillages, mais aussi pour la future signalisation actuellement en cours de déploiement et pilotable via Train Controller.
Cette transformation a également été l’occasion de revoir la commande du passage à niveau afin qu’il puisse lui aussi être piloté par le logiciel (et arrêter de fermer au hasard, comme dans la vraie vie).
Les essais se sont révélés concluants ; un programme de test a été créé dans le logiciel et sert désormais de référence pour l’ensemble des validations.
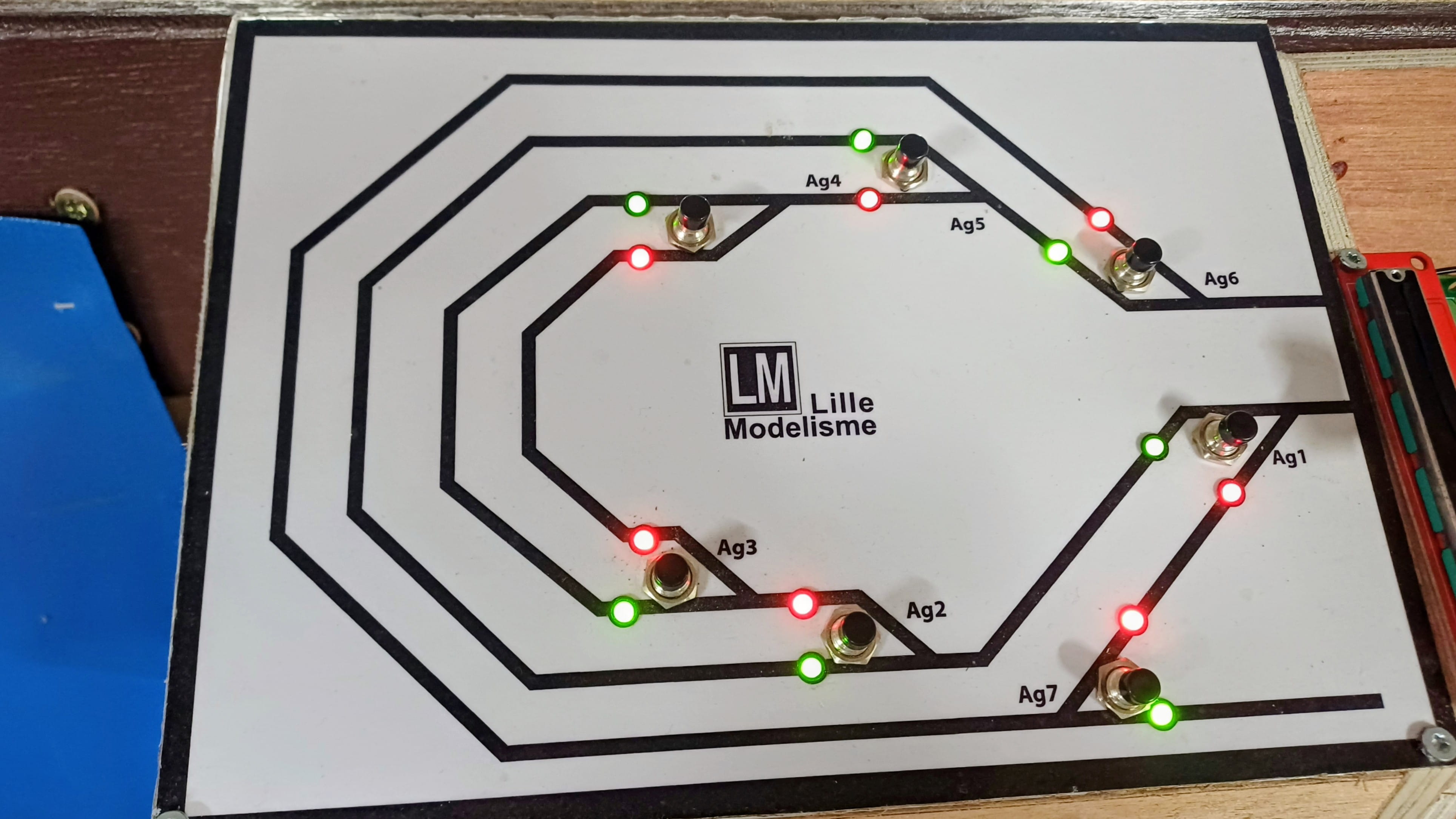
En parallèle, un TCO physique situé au niveau de la grande raquette permet toujours le pilotage manuel des aiguillages, ainsi qu’une table de commande analogique redéveloppée autour d’un Arduino. Celle-ci gère le sens de marche, les courts-circuits et les surcharges, pour le plus grand plaisir des membres utilisant du matériel non numérique — parce que le vintage, c’est aussi une philosophie.
Une formation à la découverte et à l’initiation au logiciel Train Controller a été organisée fin 2025.
Ce qu’il reste à faire :
- Rendre la grande gare compatible, notamment au niveau de ses aiguillages, afin de permettre l’arrivée des trains grandes lignes
- Motoriser les aiguillages du Stack pour la partie marchandise